博客
|
2026-01-10
Amnon Shashua 教授发表CES 2026年度主题演讲:Robotaxi最新动态、人工智能突破与机器人技术革新
展望2026年及未来,Mobileye首席执行官Amnon Shashua教授公布了公司的多项关键进展,包括重大里程碑事件、重磅合作成果、Robotaxi 技术持续推进、创新训练方法和人形机器人领域的最新突破。

这些进展标志着公司迈入发展新阶段。
Mobileye 以 Amnon Shashua 教授的年度演讲宣告CES 2026正式启幕。
Amnon Shashua 教授登台演讲,展望2026年及未来,公布了公司多项关键进展。演讲全面覆盖从高级驾驶辅助系统(ADAS)到自动驾驶汽车(AV)的全产品布局以及核心里程碑事件,包括与大众汽车和MOIA在自动驾驶出租车(Robotaxi)领域的合作进展,以及Mobileye视觉-语言(VLSA)模型与创新训练方法的最新技术突破。最后,宣布当日重磅新闻--通过收购Mentee Robotics,Mobileye正式进军人形机器人领域。
这些发布共同标志着公司迈入全新的发展阶段--Mobileye 3.0。在这一阶段,Mobileye将其在物理AI领域的技术领导力进一步拓展至两大极具潜力的前沿赛道。
公司业绩与解决方案部署
Amnon Shashua 教授首先概述了Mobileye的市场地位、预期营收以及解决方案部署规模等数据,重点强调了关键增长点。
进入2026年,Mobileye未来八年的预期营收总额达245亿美元,较2023年173亿美元的预期金额增长约42%。2025年,公司斩获过去十年未曾合作过的两家新车企(OEM)的定点项目,同时,EyeQ™6L芯片获得定点数量较2024年增长3.5倍。
截至2025年第三季度末,全球已有超过2.3亿辆汽车搭载了Mobileye技术。
环绕式ADAS正在引领面向大众市场量产车型的驾驶辅助技术突破
演讲重点披露了一项重大定点成果:一家美国头部车企已选定Mobileye环绕式ADAS™平台,搭载于其即将推出的面向大众市场量产车型上。此项合作进一步印证了行业趋势--传统基础ADAS正在加速向环绕式ADAS演进。
环绕式ADAS配置多个摄像头和雷达,通过单个ECU内置的一颗EyeQ™6H系统集成芯片(SoC)来处理数据,实现全车周感知与辅助驾驶功能。该集中式架构旨在降低整车厂系统复杂度与成本的同时,支持更高级别的驾驶辅助功能,包括一体化泊车能力,以及在特定高速公路的运行设计范围内驾驶员”运动脱离|需注视”的驾驶体验。

至2033年,计划同MOIA联合部署超过10万辆 Robotaxi
自动驾驶出租车(Robotaxi)在公共道路的安全落地需要端到端生态系统支持,包括持续运营、车队管理以及真实路况适配能力。在主题演讲中,围绕ID. Buzz项目,大众汽车自动驾驶出行公司首席执行官Christian Senger受邀登台,深入探讨了大规模部署的实践路径。
在这项合作中,大众汽车提供具备产业规模的车辆生产能力,Mobileye通过Mobileye Drive™系统提供L4级完全自动驾驶技术,MOIA则负责车队运营与出行服务层搭建,三方共同围绕ID. Buzz平台构建完整的运营生态系统。该项目计划于2026年在美国启动首批部署,随后逐步拓展至欧洲市场。
此项合作将自动驾驶出租车(Robotaxi)项目扩大到了可观的规模,目前已在多种天气与气候条件(晴天、雨天、雪天)下的多个城市开展测试。据Christian Senger透露,MOIA计划到2033年,部署超10万辆搭载Mobileye系统的高等级驾驶自动化车辆。
人工智能如何深度融入自动驾驶
合作推动业务落地的同时,技术创新也在持续加速,人工智能已成为自动驾驶演进的核心驱动力。更强大的新模型不断涌现,其应用早已不再局限于纯数字世界,而是扩展到在真实物理环境中运行的系统。但即便依托超高性能模型,人工智能领域的核心挑战仍未消除,包括“幻觉”问题、安全验证保障、以及大规模训练需求等。
Shashua教授阐述了Mobileye针对这些限制设计的架构方案,以及如何通过“快思考与慢思考”决策双系统、视觉-语言-语义-动作(VLSA)融合模型等创新,在算力和功耗受限的实时系统中,充分发挥现代人工智能的优势,同时保持极高的决策准确性。
“快思考与慢思考”决策双系统
这一架构的核心在于从“快思考”和“慢思考”两个维度看待驾驶任务:快思考系统负责高频率的“反射式”决策,包括安全层相关决策;慢思考系统则负责处理需要对整体场景进行推理的驾驶决策(不直接影响行车安全),因此可采用低频率运行模式。
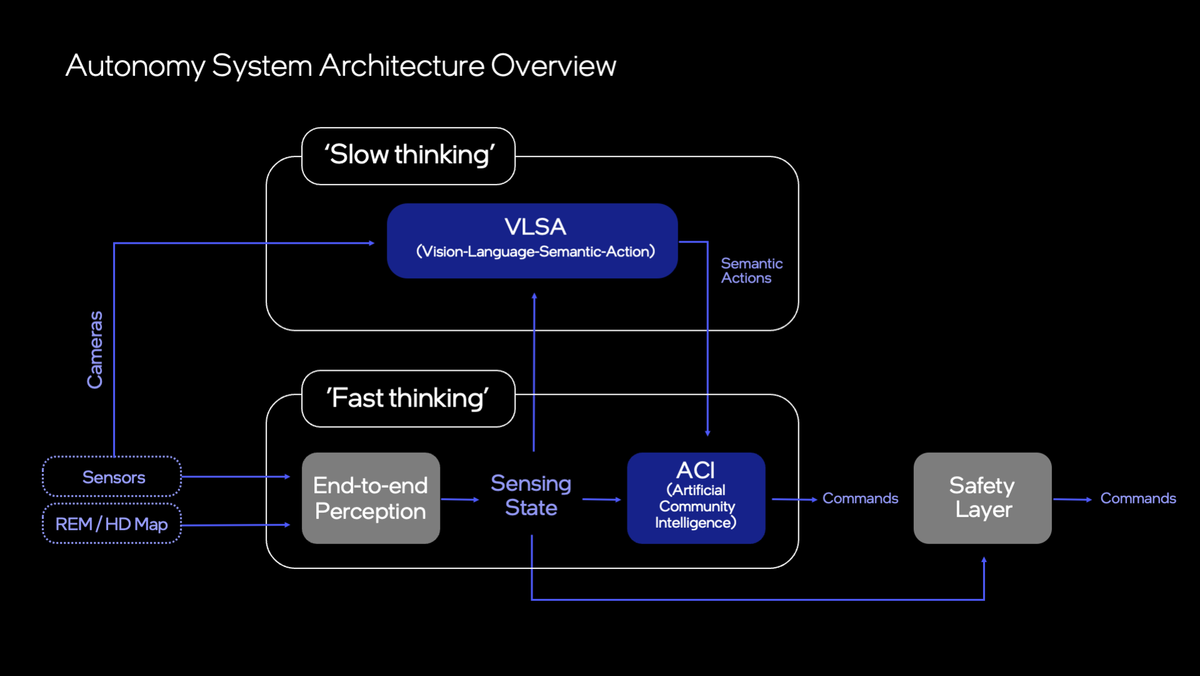
基于ACI的涌现式驾驶策略
这一架构的核心支撑是人工群体智能(Artificial Community Intelligence,ACI),一种基于自博弈的驾驶策略框架,其驾驶策略训练依托于感知状态仿真,而非逼真图像。借助Mobileye路网智能技术生成的高清地图,ACI将车辆、行人、公交车等道路参与者模型置于真实道路场景中,并为每个模型配置数百万种可能的驾驶行为。这一设计可高密度注入低频但高风险的极端场景,并能在极短时间内生成数十亿小时级别的仿真驾驶数据。
视觉-语言-语义-动作(VLSA)模型
视觉-语言-语义-动作(VLSA)模型作为慢思考系统的核心,是一种基于视觉-语言的深层场景语义处理模型,其作用类似于在复杂驾驶场景中陪伴新手驾驶员的资深驾驶员。VLSA模型不直接控制车辆或输出行驶轨迹,而是提供结构化的语义指导,馈入规划系统,而安全关键控制仍由受正式安全层约束的快思考系统负责。
通过快思考与慢思考的功能分离机制,结合大规模仿真训练,构建了一套无需将生成式模型置入安全环路、也无需依赖人工远程操控来解决所有边缘场景的自动驾驶规模化可拓展的路径。

从“需注视”到“注意力脱离”:ADAS、自动驾驶与机器人技术的未来
Shashua教授展望了2030年代驾驶自动化行业在三大领域的进化路径,涵盖ADAS、消费级自动驾驶汽车、以及自动驾驶出租车(Robotaxi),核心围绕“智能安全扩展”展开。目前应用于高端消费级汽车的L2++“驾驶员运动脱离|需注视”系统,将持续进行成本优化,逐步成为更广泛车型的标配。
消费级L3系统将从当前的“视觉脱离”向L4“注意力脱离”驾驶进化,降低人工干预频率,并扩展至现有高速公路设计运营范围之外的场景。已具备商业部署能力的自动驾驶出租车(Robotaxi)系统,将通过传感器优化、成本降低,以及车辆远程操控比例的大幅下降等实现加速发展。
展望2030年,驾驶自动化领域的下一个重大变革将是从“视觉脱离”到“注意力脱离”的跨越,人工干预频率将降至足以支撑大规模部署的水平。
Mobileye 与 Mentee Robotics:物理AI的新疆域
在主题演讲的尾声,Shashua教授宣布Mobileye将收购Mentee Robotics。Mentee专注于垂直整合的软硬件研发,核心技术包括仿真优先式学习、少样本泛化、高灵巧度人形机器人手部设计和零远程操控技术。
通过此次收购,Mobileye的业务范围将从汽车领域拓展至更广泛的、同样面向现实世界构建的物理AI系统赛道。
此举反映了驾驶自动化与机器人技术的深度融合趋势,两大领域共享核心物理AI技术架构,涵盖多模态感知、环境建模、意图感知规划、精密控制,以及不确定性下的决策制定能力。
相关新闻



媒体联系人
联系公关团队